Чем роторная машинка отличается от индукционной?
В результате сексуальной революции общество стало проще относиться к людям, украшающим свое тело при помощи татуировок — рисунков чернилами, которые при помощи иглы вводятся под кожу и там закрепляются. Современные татуировщики используют для нанесения татуировки специальные устройства, наиболее распространенными из которых являются роторные и индукционные татуировочные машинки.
Если вы решили освоить профессию мастера тату и не можете определиться, какая из машинок лучше или же вам просто любопытно, как происходит процесс создания татуировки в каждом из случаев — эта статья для вас. Рассмотрим подробнее, что представляют из себя роторная индукционная машинка, а также какие они имеют общие черты и различия.
Что такое роторная машинка?
Роторная машинка работает за счет преобразования вращательного движения в возвратно-поступательное, в процессе которого и происходит погружение иглы под кожу. Машинка такого типа имеет возможность регулировки силы погружения иглы и ее скорость.
Роторная машинка
За счет максимально тонкой иглы интенсивность болевых ощущений снижена, а травмы кожного покрова сведены к минимуму. Роторной машинкой практически невозможно оставить шрам. Работа должна осуществляться медленно и аккуратно, поскольку вибрация отсутствует, а наносятся ею обычно только прямые линии и четкие контуры. Также возможно их использование для перманентного макияжа.
Что такое индукционная машинка?
Татуировочная машинка, движение иглы в которой происходит за счет воздействия магнитов, имеет название индукционной.
Индукционная машинка
При слишком сильном ударе возможно глубокое повреждение кожи, которое оставляет шрам и может испортить деталь рисунка, также может быть задет нерв и вызвать сильную болевую реакцию. При низкой мощности работы игла будет недостаточно глубоко и интенсивно пронимать в кожу, оставляя краску практически возле ее поверхности. Такая татуировка очень быстро бледнеет или ее контуры расплываются. Также при использовании индукционной машинки можно легко изменять плотность заливки больших площадей.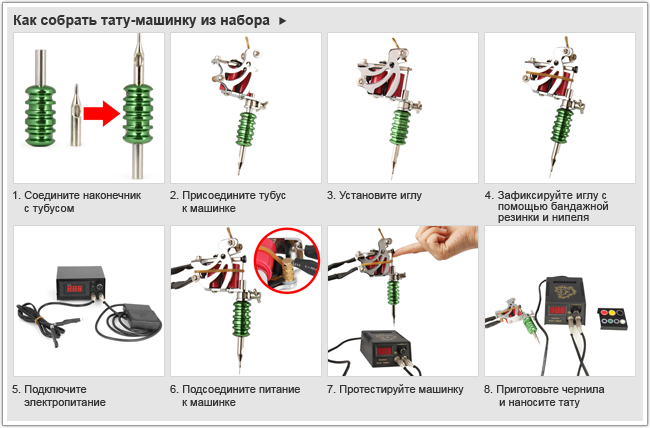
Какие общие черты имеют индукционные и роторные машинки?
- Обычно создание полноценной татуировки не обходится одним из устройств, профессиональные тату-мастера имеют в своем арсенале обе машинки.
- Простые рисунки без мелких деталей и больших площадей заливки мастер с одинаковым успехом выполнит любой из машинок.
В чем различие индукционных и роторных машинок?
- Роторные машинки намного легче и при работе с ними рука мастера устает намного меньше.
- Роторные предназначены для выполнения прямых линий и четких контуров, а индукционные — штрихов, переходов и заливки больших площадей.
- Роторные машинки имеют небольшую глубину проникновения иглы и низкую эффективность на проблемных участках — грубая кожа, жировые отложения и целлюлит.
- Роторная машинка требует неоднократного проведения по поверхности рисунка, в то время как индукционная справляется с введением чернил за один раз.

- Работе с роторным устройством характерно тихое жужжание, а индукционным — достаточно громкий треск.

Красота и модаКомментировать
Роторная тату-машинка: ее преимущества и отличия от индукционной
28 января, 2021 Автор: Администратор 0
Украшение тела татуировками на протяжении веков пользуется неизменной популярностью. Сегодня этот процесс доведён до совершенства за счёт применения специальных механизмов. Наиболее удобна в работе роторная тату машинка, для использования которой не нужно профессиональных навыков. Такой инструмент стал привычным для мастера и позволяет набить красивый рисунок любой сложности. Для правильного выбора этого оборудования следует подробно рассмотреть, что такое роторная тату машинка и в чём заключаются её преимущества.
Такой инструмент стал привычным для мастера и позволяет набить красивый рисунок любой сложности. Для правильного выбора этого оборудования следует подробно рассмотреть, что такое роторная тату машинка и в чём заключаются её преимущества.
Принцип работы машинки для тату
Для создания красивого рисунка удары иглы при нанесении тату должны быть одинаковой силы. Не менее важна и глубина прокола кожи, от которой напрямую зависит чёткость линий. Для выполнения таких задач будет необходима хорошая роторная тату машинка. В этом случае игле придаётся возвратно-поступательное движение, скорость которого можно настроить от 50 до 1 тыс. ударов в минуту. Глубина прокола также плавно регулируется и в среднем составляет около 2 мм. Высокая скорость работы поступательного механизма делает проколы малочувствительными и такие повреждения кожи заживают очень быстро.
Не все машинки для выполнения тату имеют механический привод. В некоторых моделях поступательное движение иглы приходит за счёт магнитных катушек.
Роторная и индукционная тату машинка – разница между ними заключается в принципе работы. Конструкция индукционного механизма более сложная, а основным элементом являются магнитные катушки. Обычно их количество составляет от 10 до 16 штук, что делает эту машинку громоздкой. Для выполнения тату таким инструментом нужны навыки, и роторный механизм более удобен в работе и ценится многими мастерами.
Какую тату машинку выбрать?
Для выполнения татуировки нужна не только практика, но и профессиональное оборудование. Среди подобного инструмента роторная машинка более предпочтительна. Использование эксцентрика и поступательной передачи делает этот механизм миниатюрным, даже при установке мощного электромотора. Решить, какая тату машинка лучше: роторная или индукционная можно обозначив преимущества механического привода перед электромагнитным реле.
- небольшой вес и компактные размеры корпуса;
- удобное размещение в руке при нанесении тату;
- точное направление иглы по контуру рисунка;
- тонкая настройка частоты и глубины ударов;
- минимальный уровень шума и вибрации;
- простота управления и точность боя.

Среди роторных машинок стоит отметить модель Fantom Bishop Rotary Tattoo Machine, предназначенную для работы с картриджами. Этот инструмент вести около 50 грамм и подойдёт как начинающим, так и опытным мастерам. Следует знать, что без индукционных моделей также не обойтись. Такие машинки отлично подходят для закрашивания больших площадей и нанесения жирного контура. Для профессионального мастера важно иметь несколько моделей, и выбирать между ними, в зависимости от характера и сложности наносимого рисунка.
Преимущества и недостатки роторных тату машинок
Роторные тату машины набирают популярность из-за их многочисленных преимуществ, по сравнению с индукционными моделями. Эти преимущества включают в себя:
- Вес. Роторные машинки работают с помощью электромотора, который делает их легче и, следовательно, такая тату-машинка проще в использовании и её удобно держать в течение нескольких часов без особых проблем.
- Шум. Роторные машинки известны своей тихой и бесшумной работой, это преимущество не только для тату мастера, но и для клиентов.
- Универсальность. Роторная тату-машинка идеально подходит для подводки и растушевки без необходимости настраивать несколько тату машинок и переключаться между ними. Они предназначены для того, чтобы мастер мог создавать линии и закрас с помощью одного аппарата, просто меняя иглы.

Однако роторные тату-машины не идеальны и в некоторых моментах уступают индукции:
- Быстрое движение иглы иногда затрудняет создание строчки, а глубина линии и затенение часто сложнее, чем у индукционной тату-машинки.
- У роторной машинки количество пигмента за одно нанесение меньше и для создания идеальной тату нужно проходиться несколько раз по одному и тому же месту.
- Электромотор, он же ротор, больше подвергается износу и перегреву.
- Также в роторных машинах очень мало деталей и часто повторяющиеся поломки связаны именно с электромотором, а его ремонт и замена существенно затратнее, чем у индукционных аппаратах.
Тату оборудование от I Piccadilly
Сегодня решить какая роторная машинка лучше для тату достаточно просто. Такая модель должна обладать небольшим весом и быть удобной для мастера. Компания I Piccadilly предлагает профессиональное оборудование для тату-салонов, которое поможет набить сложный художественный рисунок. Небольшая роторная тату машинка позволит развить мастерство и избежать ошибок при внесении пигмента под кожу. Такой инструмент стоит дополнить пигментами и расходными материалами, что позволит создать оригинальное тату, которое украсит любого человека.
Такая модель должна обладать небольшим весом и быть удобной для мастера. Компания I Piccadilly предлагает профессиональное оборудование для тату-салонов, которое поможет набить сложный художественный рисунок. Небольшая роторная тату машинка позволит развить мастерство и избежать ошибок при внесении пигмента под кожу. Такой инструмент стоит дополнить пигментами и расходными материалами, что позволит создать оригинальное тату, которое украсит любого человека.
Разница между линейным асинхронным двигателем и роторным асинхронным двигателем – Новости
Разница между линейным асинхронным двигателем и роторным асинхронным двигателем разница. Просто получите механическое движение по-другому. Но и в электромагнитном исполнении есть большая разница драмы, в основном в следующих трех аспектах:
(1) Трехфазная обмотка статора роторного асинхронного двигателя симметрична. Таким образом, если приложенное трехфазное напряжение симметрично. Трехфазный ток симметричен. Но линейная трехфазная обмотка линейного асинхронного двигателя несимметрична в пространственном положении. Катушка на краю сравнивается с катушкой, расположенной посередине. Значение индуктивности сильно отличается. Другими словами: реактивное сопротивление фаз не равно. Таким образом, даже если трехфазное напряжение симметрично. Ток трехфазной обмотки также несимметричен. Следующие аналогичны ”
Трехфазный ток симметричен. Но линейная трехфазная обмотка линейного асинхронного двигателя несимметрична в пространственном положении. Катушка на краю сравнивается с катушкой, расположенной посередине. Значение индуктивности сильно отличается. Другими словами: реактивное сопротивление фаз не равно. Таким образом, даже если трехфазное напряжение симметрично. Ток трехфазной обмотки также несимметричен. Следующие аналогичны ”
(2) Комплект роторного асинхронного двигателя, воздушный зазор ротора круглый, без головы и без хвоста, непрерывный. Нет начала и конца. Но линейный асинхронный двигатель между первичным и вторичным воздушным зазором существует между началом и концом. Когда вторичный конец входит или выходит из воздушного зазора. Будет во вторичном проводнике индуцировать дополнительный ток. Это так называемый «маргинальный эффект». Из-за влияния краевого эффекта линейный асинхронный двигатель и вращающийся асинхронный двигатель сильно различаются по рабочим характеристикам. Следующие аналогичны ”
Следующие аналогичны ”
(3) Поскольку линейный асинхронный двигатель рано, вторичный в направлении прямой линии, чтобы продолжать определенную длину, а нормальная электромагнитная сила часто неравномерна, поэтому механическая структура общего между первичным и вторичным воздушным зазором выполнена Длиннее. такой. Его коэффициент мощности ниже, чем у роторного асинхронного двигателя.
Линейный асинхронный двигатель делится на плоский односторонний, плоский двухсторонний, цилиндрический, с коротким статором и коротким ротором, мощность может быть однофазной или трехфазной. Для одностороннего линейного асинхронного двигателя, например, он состоит из статора и подвижного тела. Статор также называют первичным, который формируется путем укладки листа электротехнической стали зубчатого колеса, а паз заделывается в паз. Движущееся тело также называют вторичным проводником, обычно изготавливаемым из меди или алюминия. Между статором и движущимся телом имеется определенное расстояние, то есть воздушный зазор. При подключении обмотки к однофазному или трехфазному переменному току плотность магнитного потока B выражается следующим уравнением: B = B0cos (ωt – πx / τ), ω = 2πf, x Расстояние на статоре поверхность, τ полюсное расстояние. Момент представляет собой полуволну плотности магнитного потока, которая равна половине длины цикла, а плотность магнитного потока является функцией расстояния x. Этот вид t и x в зависимости от плотности магнитного потока называется магнитным полем бегущей волны, которое представляет собой вращение двигателя с вращающимся магнитным полем по тому же принципу. Как описано выше, магнитный поток создается в статоре после подачи переменного тока, а вихревой ток индуцируется на металлической пластине подвижного тела по закону Ленца. Пусть наведенное напряжение вихревого тока равно E, индуктивность L и сопротивление R на металлической пластине, вихревой ток на металлической пластине I = E/z, вихревой ток и плотность магнитного потока будут создавать непрерывную тягу F Существует положительная и отрицательная тяга, но тяга намного больше, чем отрицательная тяга, сила, действующая на тело, в основном положительная, что является принципом работы линейного асинхронного двигателя.
При подключении обмотки к однофазному или трехфазному переменному току плотность магнитного потока B выражается следующим уравнением: B = B0cos (ωt – πx / τ), ω = 2πf, x Расстояние на статоре поверхность, τ полюсное расстояние. Момент представляет собой полуволну плотности магнитного потока, которая равна половине длины цикла, а плотность магнитного потока является функцией расстояния x. Этот вид t и x в зависимости от плотности магнитного потока называется магнитным полем бегущей волны, которое представляет собой вращение двигателя с вращающимся магнитным полем по тому же принципу. Как описано выше, магнитный поток создается в статоре после подачи переменного тока, а вихревой ток индуцируется на металлической пластине подвижного тела по закону Ленца. Пусть наведенное напряжение вихревого тока равно E, индуктивность L и сопротивление R на металлической пластине, вихревой ток на металлической пластине I = E/z, вихревой ток и плотность магнитного потока будут создавать непрерывную тягу F Существует положительная и отрицательная тяга, но тяга намного больше, чем отрицательная тяга, сила, действующая на тело, в основном положительная, что является принципом работы линейного асинхронного двигателя. Устройство привода линейного асинхронного двигателя может использовать инвертор. Выходной частотой инвертора можно управлять под действием управляющего сигнала, который может управляться логикой или замкнутым контуром. Преобразователь частоты выдает другую частоту, и соответственно изменится результирующая тяга. Поскольку частота двух катушек статора различна, возникает синхронное изменение магнитного поля бегущей волны, так что тяга двигателя изменяется от 0 до максимума.
Устройство привода линейного асинхронного двигателя может использовать инвертор. Выходной частотой инвертора можно управлять под действием управляющего сигнала, который может управляться логикой или замкнутым контуром. Преобразователь частоты выдает другую частоту, и соответственно изменится результирующая тяга. Поскольку частота двух катушек статора различна, возникает синхронное изменение магнитного поля бегущей волны, так что тяга двигателя изменяется от 0 до максимума.
Асинхронный двигатель и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один является стационарным и (обычно) связан с внешним корпусом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием между двумя полями.
В простом двигателе постоянного тока имеется вращающееся магнитное поле, полярность которого меняется на противоположную каждые пол-оборота с помощью комбинации щетка-коллектор.
Уникальное качество асинхронного двигателя заключается в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сеть переменного тока подается на клеммы двигателя и питает стационарные обмотки.
Все асинхронные двигатели являются асинхронными. Асинхронное прозвище возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью ротора.
Короткозамкнутый ротор асинхронного двигателя. Этот пример из небольшого вентилятора. Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов проводящими кольцами, которые электрически закорачивают стержни друг с другом.
Также можно найти асинхронные двигатели, роторы которых состоят из обмоток, а не из беличьей клетки. Их называют асинхронными двигателями с фазным ротором. Суть конструкции состоит в том, чтобы обеспечить средства снижения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного соединения каждой обмотки ротора с резистором. Обмотки получают ток через какое-то контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически он становится таким же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток асинхронного двигателя (статор) подключается к сети переменного тока. Приложение напряжения к статору вызывает протекание переменного тока в обмотках статора. Протекание тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но положение полюса статора меняется, когда переменное напряжение меняется по амплитуде и полярности. Индуцированный полюс ротора пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила возникает, когда петля провода перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем у поля статора. Разница между ними называется скольжением.
Величина скольжения может варьироваться. Это зависит в основном от нагрузки, которую приводит двигатель, но также зависит от сопротивления цепи ротора и силы поля, которое индуцирует поток статора. Скольжение в двигателе конструкции B колеблется от 0,5% до 5%.
Скольжение в двигателе конструкции B колеблется от 0,5% до 5%.
Когда двигатель стоит, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора. Когда переменный ток изначально подается на статор, ротор не движется. Таким образом, напряжение, индуцируемое в роторе, имеет ту же частоту, что и в статоре. Когда ротор начинает вращаться, частота наводимого в нем напряжения f р , капли. Если f – частота напряжения статора, то скольжение, s, связывает их через f r = sf. Здесь s выражается десятичной дробью.
Поскольку асинхронный двигатель не имеет щеток, коллектора или аналогичных движущихся частей, его производство и обслуживание дешевле, чем двигателей других типов.
Рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не индукционным (за исключением некоторых конструкций, только для обеспечения пускового момента). Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для привода высокоточных часов.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно за целое число циклов переменного тока. Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Число оборотов ротора двигателя, т. е. синхронная скорость N, составляет:
N = 120f/P = 60 f/P
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности построить более медленный двигатель дороже. При 60 Гц:
При 60 Гц:
- Двухполюсный/фазный синхронный двигатель переменного тока вращается со скоростью 3600 об/мин.
- Четырехполюсный/фазный синхронный двигатель переменного тока вращается со скоростью 1800 об/мин.
- Шестиполюсный/фазный синхронный двигатель переменного тока вращается со скоростью 1200 об/мин.
- Восьмиполюсный/фазный синхронный двигатель переменного тока вращается со скоростью 900 об/мин
- Десятиполюсный/фазный синхронный двигатель переменного тока вращается со скоростью 720 об/мин.
- Двенадцатиполюсный/фазный синхронный двигатель переменного тока вращается со скоростью 600 об/мин.
Синхронные двигатели переменного тока с малой мощностью в несколько лошадиных сил полезны там, где требуется точная синхронизация. Синхронные двигатели переменного тока высокой мощности, хотя и дороже трехфазных асинхронных двигателей, обладают двумя дополнительными качествами. Несмотря на более высокую первоначальную стоимость, они могут оказаться полезными в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, одновременно выполняя полезную работу.
Во-вторых, иногда одновременно они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, одновременно выполняя полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока. Они обычно классифицируются в соответствии с их средствами создания магнитного поля. У двигателей с независимым возбуждением магнитные полюса питаются от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в машине с самовозбуждением (также иногда называемой невозбуждаемой и непосредственно возбуждаемой) машиной. К типам без возбуждения относятся реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянного тока.
Синхронные двигатели без возбуждения имеют стальные роторы. Во время работы ротор намагничивается необходимыми магнитными полюсами аналогично асинхронному двигателю. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные двигатели. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент невелик.
Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные двигатели. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент невелик.
В реактивном двигателе ротор имеет выступающие полюса, которые напоминают отдельные зубья. Число полюсов ротора меньше, чем полюсов статора, что препятствует выравниванию полюсов статора и ротора, в результате чего вращения не будет. Реактивные двигатели не запускаются самостоятельно. По этой причине в ротор часто встраивают специальные обмотки (называемые обмотками с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный двигатель.
В гистерезисном двигателе используется широкая петля гистерезиса в роторе из кобальтовой стали с высокой коэрцитивной силой. Из-за гистерезиса фаза намагниченности в роторе отстает от фазы вращающегося магнитного поля статора. Это отставание создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он запускается автоматически.
Из-за гистерезиса фаза намагниченности в роторе отстает от фазы вращающегося магнитного поля статора. Это отставание создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он запускается автоматически.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и редуктор не требуется.
Пример двигателя с электронным управлением на постоянных магнитах, в данном случае от небольшого вентилятора. Этот тип называется аутраннером, потому что ротор находится снаружи статора и встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации. Синхронный двигатель с прямым возбуждением может называться по-разному, включая ECPM (электронно-коммутируемый постоянный магнит), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянными магнитами. Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Компьютер управляет последовательным включением питания на обмотках статора в нужное время с помощью полупроводниковых переключателей. Мощность подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально выровнен с зубцом статора, крутящий момент не создается. Если зубец ротора находится под некоторым углом к зубцу статора, по крайней мере, некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зубьев. Результатом является крутящий момент на роторе. Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще одним типом синхронного двигателя является двигатель с реактивным сопротивлением (SR).
Его ротор состоит из стальных пластин с набором зубьев. Зубцы магнитопроницаемы, а окружающие их участки слабопроницаемы за счет прорезанных в них пазов.
В отличие от асинхронных двигателей, в роторе отсутствуют стержни ротора и, следовательно, в роторе не протекает ток, создающий крутящий момент. Отсутствие проводника какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях с роторами, несущими проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем модуляции крутящего момента (посредством тока обмотки). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки.